


The image above is a 100% crop of a single 20min exposure (no darks nor flats but some simple curves and levels) taken unguided using the DDM60Pro, William Optics Zenithstar 66mm and FLI ML8300. The image scale is ca 2.75 arcsec/pixel and, as measured in MaximDL, the average star trailing is about 8%. A lot of effort was put into getting this result. Presently I have changed the OTA (ASA N10 with an image scale of 1.24 arcsec/pixel) and is trying to obtain similar results.
The ASA mounts have, as most mounts, basically two modus operandi; guided and unguided. Most mounts can be made to perform well under guided operation, but have difficulties to operate unguided. This page is focused on unguided operation.
In a way all mounts can also be used unguided provided that the exposure time is short enough and/or the image scale is large enough. So we need some definition of what we mean with unguided operation in this respect. This is of course arbitrary but most would agree that a mount that allows for say 10 second sub exposures is not good for unguided usage. Most of us would also say that 30 min unguided sub exposures without star trailing would be excellent. Since there are no real standards, I will use the following minimum requirements
- Minimum 5 min sub exposures
- Image scale of about 1 arcsec/pixel or lower
- Star trailing no more than ca 10% using e.g. MaximDL, CCDInspector, etc.
These figures are not entirely arbitrary. The optimal sub exposure will of course depend on many things like light pollution, OTA (fastness), your goals (RGB or narrow band), but I think it is reasonable to have 5 min as a minimum requirement for unguided operation. It would allow for a reasonable exposure time on a light polluted location for LRGB imaging. An image scale of about 1 arcsec/pixel is also reasonable, since most of us have seeing around 2 arcsec and upwards, and allows some margin (some have better than 2 arcsec seeing) and allows for a reasonable sampling. Also if the measured star trailing is about 10% it is hardly noticeable, which will allow for round stars in the final image.
ASA claims that their mounts can be operated unguided, which is also supported by a number of users that do unguided imaging (list of users). There are also users that have given up on operating unguided and have started to guide instead.
The question is then what differs these two groups of users from each other? To answer let us look closer at what is required to operate unguided.
The first thing is that the mount itself need to be accurate enough. You have to eliminate things like backlash, periodic errors, non-periodic errors etc. The ASA mounts are direct drive mounts and are free from the error sources associated with geared mounts. The ASA mounts are, however, dependent on other things to operate smoothly. One example is PID feedback loop, which is used to constantly minimise the difference between the mounts "is" position and "wanted" position. Errors in the parameters of this feedback loop may cause the mount to shake and behave erratic. However, most users manages (some times with some frustration) to set the these parameters and ASA can also provided a remote session service as a last resource. So in principle the ASA mounts has what it takes to operate unguided.
But is the mount the only part of the equation? Unfortunately not. There are also other sources of error, like Polar Alignment (PA) error, misalignment of mount axis and optical axis, flexure, etc. Here I would like to divide these errors into two main groups; reproducible and non-reproducible.
Reproducible errors are errors that will stay the same for a certain sky point (az, alt) no matter how or when you get to that point. A typical example is a slight PA error. Another example (affecting pointing but not tracking) is when the mount pointing axis and the optical axis if the OTA is not exactly the same. There are two ways to deal with the reproducible errors; you minimise them or you have some software that corrects for them. The best is probably to do a little of both. Get as good PA as your conditions allow and then apply some software corrections. For ASA mounts the software corrections can be measured and incorporated into the mounts controlling software and is called a Pointing Model. Assuming it is possible to create a good Pointing Model we can handle the reproducible errors.
The non-reproducible errors, on the other hand is a completely different kind of animal and I believe that this is where some ASA mount owners give up. It is too difficult/time consuming to find and handle the non-reproducible errors. This is also the reason why I started this page - as a collection of ideas where to look for non-reproducible errors and how to deal with them.
In order to achieve unguided operations it is essential that the non-reproducible errors be minimised or preferable eliminated. There is no way a software model can compensate for non-reproducible errors since by their nature they change, even for the same sky point.
So what can these non-reproducible errors look like? Below is a list of things I have experienced and I will gladly except any addition to the list.
Mirror movements: I started out with a Celestron C8 and even if the mirror movements where small it prevented me to image unguided. If you can not really lock the mirror down you will not be able to operate unguided. The only thing you can do is to securely lock the mirror or change OTA.
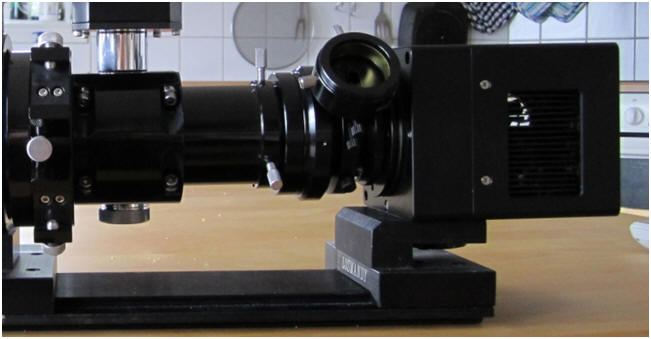
Focuser flexure: There has been several examples where flexing focusers have been the root cause for failing unguided operation. It does not take more than a few pixels movement for the star trails to get much longer than 10%, and a pixel is only a few microns large. After the C8 I put a William Optics Zenithstar 66 on my ASA DDM60. It was a refractor, meaning no mirror movements, and the focal length is only 388mm, meaning that the image scale was large. For these reasons I believed this setup to be a good starting point for unguided imaging. However as it turned out the focuser flexure was far too large. I found this out by clamping down the camera, preventing the focuser to move at all (see image below). With the camera clamped down (focuser fixed) I could take 20min unguided images at this focal length. Of course I focused before fixing my camera/focuser, so the focus was not perfect. After having confirmed this I replaced the "clamp down solution with a linear bearing, I kind of mono-rail for the camera to slide in and out on. It is essential that your focuser is really rigid.
Flexure: just so we do not forget it, there might be other types of flexure as well. In the connection between filter wheel and camera, etc. This type of flexure must also be minimised. There is a piece of software called Sequence (that can be used with ASA mounts) with which you can measure your setups non-reproducible flexure. This may be one starting point for a flexure analysis. Here are some examples of what a Pointing Model might look like when there is flexure.
Loose filters: Just recently I noticed some non-reproducible errors in a Pointing Model I did. After some investigation I found out that my luminance filter (used for creating the Pointing Model) was loose. This would cause the filter to shift/move as I moved the mount. This error was simply removed by fixing the filter.
A bad PC clock: The ASA mounts is controlled by a software called Autoslew (AS), which resides outside the mount on a connected PC. What AS does is to compare the mounts actual position (as reported by the direct drives encoders) with the wanted mount position and then issuing corrective commands to the mount. This can be done hundreds of times per second and will secure that the mount is tracking well (including corrections from the Pointing Model). However the "wanted" position in RA is depending on the time, which AS reads from the PC clock. In my case the PC clock was faulty making AS use the wrong RA as the wanted position in an erratic manner. If e.g. the PC clock deviates 2 seconds, this will correspond to 2*15 = 30 arcsec star drift (at DEC=0). Again this prevented unguided operations. The only way around this was to replace the PC. Here is a way to check the accuracy of the PC clock.
© 2011 Matts Sporre